550000 تومان



269,000 تومان
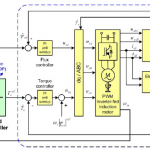
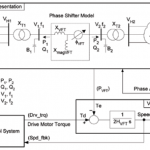
در این پروژه کنترل یک موتور dc با کنترل کننده های تناسبی-مشتقی و تناسبی-انتگرالی مورد بررسی قرار میگیرد. موتور dc بصورت دینامیکی شبیه سازی شده است. از سه قسمت مجزا به نامهای Proportional (تناسبی)،Integral (انتگرالگیر) و Derivative (مشتقگیر) تشکیل شده که هر کدام از آنها سیگنال خطا را به عنوان ورودی گرفته و عملیاتی را روی ان انجام میدهند و در نهایت خروجی شان با هم جمع میشود. خروجی این مجموعه که همان خروجی کنترلکننده PID است برای اصلاح خطا (error) به سیستم فرستاده میشود. یکی از کنترل کننده هایی که در درایو موتورهای الکتریکی استفاده میشود، کنترل کننده PID است. کنترل کننده تناسبی انتگرالی و تناسبی مشتقی سیستم های کنترل حلقه بسته ای هستند که عملکرد کنترلی را بهبود بخشیده و خطای حالت ماندگار را کاهش میدهند.
این پروژه که در سیولینک متلب شبیه سازی شده است شامل ۷ شبیه سازی است که همه حالت های کنترل کننده نظیر تناسبی، تناسبی- مشتقی و تناسبی- انتگرالی را باضرایب مختلف بر روی موتور dc تست میکند.