موتور براشلس نوعی از موتورهای dc است که در صنایع به وفور از آن استفاده میشود. در موتور جریان مستقیم براش به معنی زغال است که وظیفه آنها تامین جریان برای آرمیچر است.موتورهای DC مرسوم اغلب دارای کموتاتور و جاروبک هستند که وجود این عناصر در موتور باعث به وجود آمدن معایب و محدودیت هایی در موتور می شود.به عنوان مثال این موتورها به نگهداری منظمی نیاز دارند(به خاطر عمر محدود زغالها و ساییدگی آنها) و نمیتوانند در محیط های آلوده استفاده شوند.همچنین وجو زغال در این موتورها سرعت را محدود می کند.کموتاتور یک عامل محدود کننده سرعت ماکزیمم موتور جریان مستقیم است.
موتور جریان مستقیم براشلس(Brushless DC Motor) همانطور که از اسمش پیداست یک موتور جریان مستقیم بدون جاروبک است که به خاطر ازبین بردن معایب و محدودیت های موتورهای زغالی طراحی شده است.موتور براشلس یک موتور سنکرون آهنربای دائم است.در این موتورها سیستم مکانیکی جاروبک و کموتاتور حذف شده است و به جای آن از یک کنترلر الکترونیکی استفاده می شود.بنابراین با حذف زغال و کموتاتور, سیم بندی به مدار کنترلر متصل می شود.موتورهای براشلس در بسیاری از موارد جایگزین موتورهای DC مرسوم شده اند. این موتورها در توان های مختلفی از موتورهای خیلی کوچک استفاده شده در هارد دیسک ها, تا موتور های بزرگ استفاده شده در خودروهای برقی وجود دارند.موتورهای براشلس نسبت به موتورهای DC مرسوم مزایایی دارند که عبارتند از:
۱)سرعت بالاتر(هارد دیسکها, هواپیماهای رادیو کنترل)
۲)راندمان بالاتر
۳)عملکرد بدون صدا
۴)عمر طولانی تر
۵)راه اندازی و توقف آسانتر(به دلیل پایین بودن اینرسی موتور)
۶)کنترل ساده
۷)نیاز به نگهداری کم
۱) ساختمان موتور BLDC
این موتور که از استاتور, رتور,کنترلر و سنسورهای اثر هال تشکیل شده است.
۱-۱) استاتور
استاتور موتور براشلس شبیه به استاتور موتور القایی سه فاز است.استاتور دارای سه دسته سیم بندی به رنگ های مختلف است که به سیم بندی سه فاز معروف است.این سیم بندی به صورت ستاره یا مثلث است که اتصال مثلث گشتاور پایین در دور بالا و اتصال ستاره گشتاور بالا در دور پایین تولید می کند.موتورهایی که اتصال ستاره دارند ساخت آنها به مراتب ساده تر است و شرکت های زیادی از این اتصال استفاده می کنند که در کاربردهای صنعتی ازجمله هارد دیسک ها مورد استفاده قرار می گیرند.این اتصال جریان کمتری نسبت به اتصال مثلث دارد و در عین حال گشتاور بیشتری تولید می کند.اما در اتصال مثلث سرعت بالاتر است و جریان بیشتری می کشد که این جریان زیاد از طریق MOSFET ها تامین می شود.از اتصال مثلث برای کاربردهای توان بالا استفاده می شود.
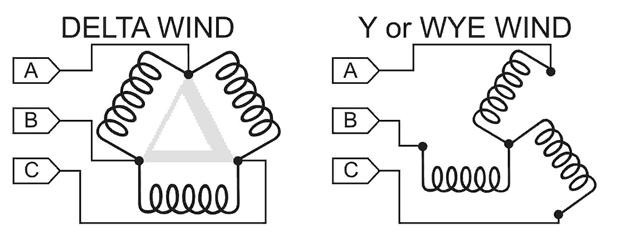
شکل ۱: سیم بندی های ستاره و مثلث استاتور
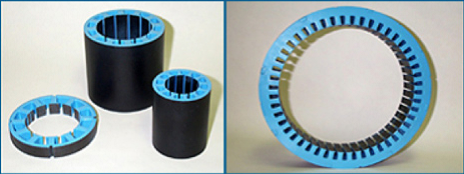
شکل۲: استاتور موتورهای BLDC
استاتور موتور براشلس میتواند چاکدار یا بدون چاک باشد.هسته بدون چاک اندوکتانس کمی دارد , بنابراین میتوان در سرعت های خیلی زیاد از این هسته استفاده کرد.عیب اصلی این استاتور قیمت بالای آن است ؛زیرا به سیم بندی زیادی برای جبران فاصله هوایی نیاز است.
۱-۲) رتور
رتور موتور براشلس از آهنربای دائم ساخته شده است.برای افزایش گشتاور باید تعداد قطبها را افزایش داد.
-۳) سنسورهای اثر هال:
این سنسورها با استفاده از پدیده الکترومغناطیسی قطب,قدرت میدان الکترومغناطیس را تشخیص می دهند.این سنسورها با زوایای ۱۲۰ یا ۶۰ درجه بر روی رتور تعبیه شده و موقعیت رتور را توسط سیگنال های منطقی نتایج را به میکروکنترلر ارسال می کنند و در نهایت طی این حلقه کنترلی سرعت رتور کنترل می شود.هدف از وجود سنسور در این نوع موتور ها تشخیص موقعیت روتور هست که توسط ان ما میتوانیم بهترین زمان برای تحریک هر سیم پیچ را مشخص و از موتور حداکثر کارایی رو دریافت کنیم. در نوع بدون سنسور ما میتوانیم از تاثیری که میدان مغناطیسی اهنربا بر سیم پیچ ها میگذارد و تحت عنوان Back-EMF شناخته میشود استفاده کنیم و موقعیت روتور را تشخیص دهیم.
۱-۴) اینورتر موتور BLDC
در موتور براشلس از یک اینورتر ۶ سطحی (پله ای ) استفاده می شود.این اینورتر جریان را به صورتی به سیم پیچ ها تزریق می کند که در هر سیم پیچ ۶۰ درجه بدون برق و ۱۲۰ درجه برقدار باشد.در این اینورتر هر پله ۶۰ درجه الکتریکی است که شش پله آن معادل ۳۶۰ درجه الکتریکی است.
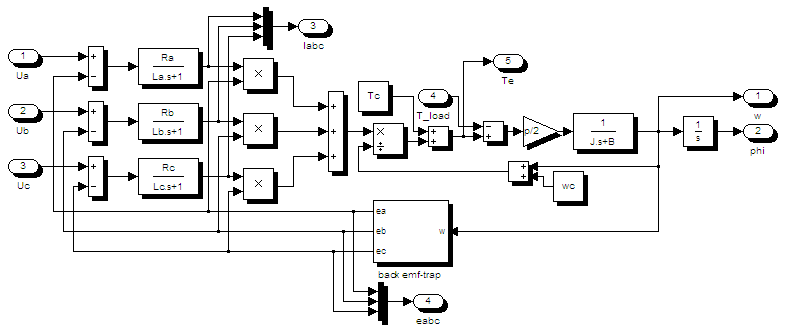
در این پروژه، شبیه سازی دینامیکی موتور براشلس با استفاده از معادلات آن در سیمولینک متلب انجام شده است.
در هیمن زمینه بخوانید: